Здравствуйте, Artashir.
1) Состояние системы на верхней или нижней эволюционной ветви - это состояние равновесия системы. Вследствие эволюционных уравнений МСП это равновесное состояние медленно изменяется. Такое медленно меняющееся равновесное состояние называют стационарным или 'steady state'. Например, во многих экономических моделях 'steady state' - это состояние роста, при котором нормы роста разных переменных связаны некоторыми соотношениями, выражающими условия балланса переменных в рассматриваемой модели. Однако вследствие действия случайных факторов состояние реальной системы, как правило, отличается от состояния 'steady state'. Это можно рассматривать как отклонение системы от ее равновесного состояния. Например, резкое внешнее воздействие на систему может сместить ее с эволюционной ветви плоскости (z;R). Что будет происходить после этого? Как только действие внешнего возмущения прекратится, система будет стремиться вернуться в свое равновесное состояние - в одну из точек на эволюционной ветви. Следовательно
помимо уравнений, которые описывают эволюцию 'stedy state' - изменение состояния равновесия системы, необходимо дополнительно ввести уравнения, которые описывают процесс возвращения "возмущенной" системы в состояние равновесия (adjustment).
Что это за процесс? Я исходил из следующих соображений. (1) Во-первых, я предположил, что это - "быстрый" процесс, то есть характерное время, за которое система возвращается в равновесное состояние много меньше того времени, которое нужно для заметного изменения самого равновесного состояния. Поэтому в уравнениях, которые описывают процесс возвращения в равновесное состояние, можно пренебречь изменением самого равновесного состояния и считать z - параметром. (2) Вследствие "быстроты" процесса возвращения в равновесное состояние можно пренебречь также изменением "потенциала" и "условий реализации" системы.
Механизм приближения системы к равновесию может состоять тогда лишь из процессов перераспределения имеющегося "потенциала" между реализуемой и нереализуемой его составляющими. Это перераспределение позволяет системе быстро изменять отношение Fr/F = R, в направлении к равновесному значению R.
Самое простое - это представить процесс возвращения в равновесие как динамическую систему типа: dR/dt = - Const * (R - Rравнов.). Я рассмотрел такую систему, предположив, что "возвращающая сила" может быть представлена в виде антиградиента от некоторой потенциальной функции, W(R): dR/dt = - dW/dR. Это - градиентная динамическая система (ГДС).
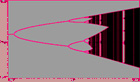
Равновесие в ГДС определяется условием dW/dR = 0. Точки равновесия должны лежать на одной из эволюционных ветвей плоскости (z;R). Согласно известному свойству ГДС точки минимума функции W(R) соответствуют устойчивому равновесию системы, а точки максимума - неустойчивому. С другой стороны, при любом z1<z<z0 есть три точки равновесия, а при z<z1 или z>z0 есть лишь одна точка равновесия. При z=z1 и z=z0 две равновесные точки сливаются.
Взяв в качестве W(R) - функцию четвертой степени, которая при z1<z<z0 имеет два минимума и один максимум, а при z<z1 или z>z0 - один минимум, нетрудно прийти к потенциалу классической катастрофы сборки. Поскольку точки минимума и максимума W(R) должны при каждом z давать соответствующие этому z значения R на эволюционной ветви (-ях), то функция W(R) зависит от z и kappa как от параметров. Величина kappa определена в статье:
http://www.ephes.ru/articl/content/arti ... hnoigs.htm - формула (23).
Я надеюсь в ближайшее время представить эти результаты на одном из сайтов.
Григорий.