Ход рассуждений в статье М. Фейгенбаума.Фегенбаум доказывает, что принцип относительности Галилея и принцип изотропии пространства достаточны, чтобы вывести все релятивистские соотношения СТО.
При выводе естественным образом возникает некоторая константа с размерностью скорости, которая выполняет в полученных формулах ту же функцию, какую скорость света выполняет в формулах выведенных Эйнштейном. Но эта константа вовсе не обязательно должна быть равна скорости света. Второй постулат Эйнштейна (скорость света одинакова во всех равномерно движущихся системах отсчёта) не нужен для вывода релятивистских соотношений.
Приведём некоторые пункты, которые поясняют, как можно вывести преобразования Лоренца и релятивистское правило "сложения скоростей" без использования второго постулата Эйнштейна.
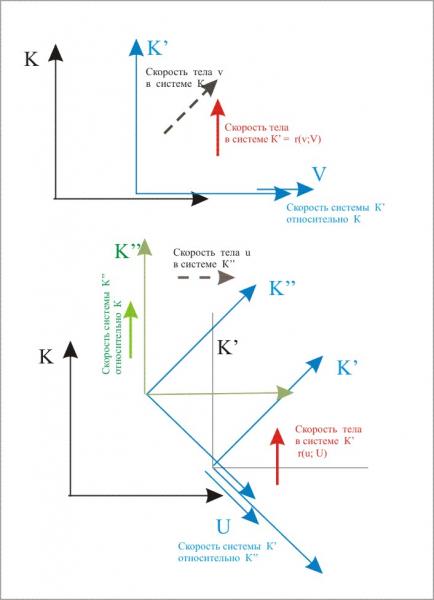
1) Сначала Фейгенбаум вводит соотношение:
r(v; V) – есть скорость тела относительно системы К’,
которая движется относительно К со скоростью V. При этом v – скорость тела в системе К. V- скорость системы K' относительно К.
Фейгенбаум исследует, какие свойства имеет отношение r(v; V) исходя из принципа относительности Галилея и выводит ряд формул.
В частности, он доказывает следующие формулы:
(1) r(0;V) = - V – скорость К относительно К’ противоположна скорости К’ относительно К.
(2) r(V;V) = 0 - скорость тела, движущегося со скоростью V относительно системы К', движущейся с той же скоростью, равна нулю.
(3) r(r(v;V);-V) = v
(3.1) Если v параллельна V, то r(v;V) = - r(V;v)
«Сложение скоростей» можно определить как отношение:
(3.2) s(v;V) = r(v;-V)
Это определение следует из тождества (3).
И далее Фейгенбаум изучает свойства отношения "сложения скоростей" s(v;V) и доказывает, что это отношение НЕ является в общем случае ни ассоциативным, ни коммутативным. А именно:
s(v,v') = R(v';v) * s(v';v) - отношение коммутативно, только если "вращение" R=1
s(s(U;V);W) = s(R(-W;V)*U; s(V;W)) - отношение ассоциативно, только если выполняется R(-W;V)*U = 1.
Эти свойства операции "сложения скоростей" выводятся из принципа относительности Галилея и изотропии пространства.
Далее Фейгенбаум доказывает, что принцип относительности Галилея выполняется, если координаты и время в системе К и К’ связаны
линейным преобразованием.
Принцип относительности Галилея: если тело движется с постоянной скоростью в системе К, то физически эквивалентными будут такие системы отсчёта, в которых это тело движется также с какой-то постоянной скоростью.
Если x = v * t + ksi - движение с постоянной скоростью v в системе К, то
x' = r(v;V) * t' + a(ksi;v) - движение с постоянной скоростью r(v;V) в системе К', которая движется со скоростью V относительно К.
Полагая, что
x' = f(x;t) и t' = g(x;t), Фейгенбаум доказывает, что эти функции линейные.
Факт линейности следует из того, что соотношение:
f(v*t+ksi; t) = r(v; V) * g(ksi + v*t; t) + a(ksi; v) - которое выражает условие, выделяющее физически-эквивалентные "миры Галилея" (в которых факт равномерности движения тел сохраняется), это соотношение должно выполняться при любых v; ksi; t.
А это можно обеспечить лишь для линейных функций x' = f(x;t) и t' = g(x;t).
Фейгенбаум отмечает, что преобразование Галилея – это частный случай общего линейного преобразования. Если же рассмотреть общий случай, то вместо преобразований Галилея:
x' = x - V * t
t' = t
Необходимо рассмотреть общее линейное преобразование:
(4) t’ = G(V) * (t – b(V) * x)
(5) x’ = G(V) * (L * x – A * t)
Здесь G(V) – число, зависящее от скорости V системы К’ относительно К, b(V) – некоторый вектор, А – тоже вектор, L – тензор.
Скорость точки в системе К’ равна:
(6) r(v;V) = v’ = x’ : t’ = (L * v – A ) : (1 – b(V) * v)
Учитывая свойства (1) – (2) получаем из (6):
(7) A = V
(8) L * V = V
Воспользуемся изотропией пространства. Пусть R – преобразование вращения. Тогда из (4) вытекает:
(9) t’ = G(R * V) * (t – b(R * V) * R * x)
Но с другой стороны, должно выполняться:
(10) t’ = G(V) * (t – (R * b(V)) * (R * x))
Сравнивая (9) и (10), получаем:
(11) G(R * V) = G(V)
(12) b(R * V) = R * b(V)
Отсюда следует, что функция G(V) зависит от V^2 – квадрата длины вектора скорости системы К', которая не меняется при вращениях.
Функция-вектор b(V), вследствие (12), имеет вид:
(13) b(V) = V : [C^2 (V^2)]
Инвариантная относительно вращений R константа обозначена как 1 : [С^2 (V^2)].
Учитывая (7) – (13), можно переписать (6) так:
(14) r(v;V) = (L * v – V) : [1 – (v * V) : C^2 (V^2)]
Если скорость тела v параллельна скорости системы К' (= V), то, учитывая (8), приводим (14) к виду:
(15) r(v;V) = (v – V) : [1 – (v * V) : C^2 (V^2)]
Учитывая (3.1), имеем:
(15.1) r(v;V) = - r(V;v) = (v – V) : [1 – (v * V) : C^2 (V^2)] = (v – V) : [1 – (v * V) : C^2 (v^2)]
Из (15.1) следует, что C^2 (V^2)] = C^2 (v^2)] при любом v.
Отсюда следует, что C^2 – это просто константа.
Таким образом, имеем окончательно:
(15) r(v;V) = (v – V) : [1 – (v * V) : C^2 ]
Учитывая определение "сложения скоростей" (3.2), находим
РЕЛЯТИВИСТСКИЙ закон сложения скоростей:
(16) s(v;V) = r(v;-V) = (v + V) : [1 + (v * V): C^2]
Таким образом, релятивистское правило сложения скоростей выводится без применения второго постулата Эйнштейна - принципа постоянства скорости света.
Преобразование Лоренца выводится из (4) и (5). Фейгенбаум показывает, как можно, шаг за шагом, получить все формулы СТО, используя лишь принцип изотропии пространства и принцип относительности Галилея.
Чтобы вывести «специальную теорию относительности» (СТО) постулат постоянства скорости света не нужен.
Это значит, что возможно, что скорость света не постоянна (если она меньше фундаментальной константы C). Формулы СТО – логически не зависят от постулата постоянства скорости света. Фейгенбаум пишет, что СТО можно было бы открыть ещё во времена Галилея. Всё, что для этого нужно, это – принцип равноправности равномерно движущихся относительно друг друга систем (принцип относительности Галилея) и изотропия пространства.
Фейгенбаум указывает причину возникновения релятивистских эффектов.
Он вводит определение параллельности пространственных осей систем K и K’. В системе К’ тоже можно ввести отношение параллельности с К’’.
Но из того, что К параллельна К’ и К’ параллельна К’’ НЕ СЛЕДУЕТ, что К параллельна К’’. То есть отношение параллельной ориентации пространственных осей не транзитивно.
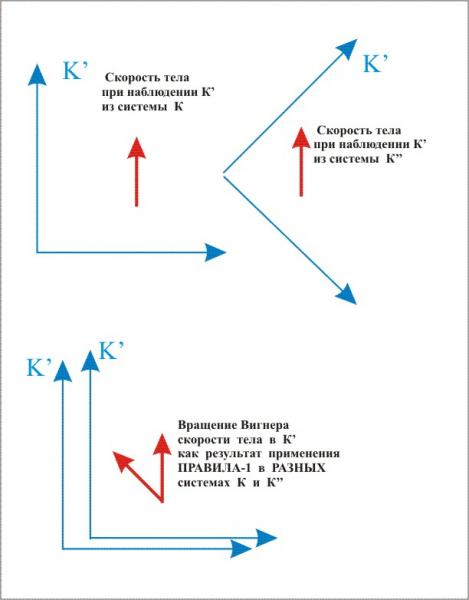
Фейгенбаум указывает, что нетранзитивность есть следствие так называемых вращений Швингера. Аналитически эти "вращения" можно описать в виде соотношения:
(17) r(r(v;U); r(V;U)) = R(U;V) * r(v;V)
R(U;V) – вращение Швингера. Здесь r(v;V) – вектор скорости тела в системе K’, которую фиксирует наблюдатель системы К. Система К’ движется со скоростью V относительно К.
r(r(v;V’); r(V;V’)) - вектор скорости тела в системе K’, которую фиксирует наблюдатель системы К’’. Система К’’ движется относительно К со скоростью U. Эти два вектора скорости отличаются поворотом Швингера. На Рисунке схематически показано, как возникает такое вращение. Тело А кажется "повёрнутым", если за системой К' следить либо из системы К, либо из системы К''.
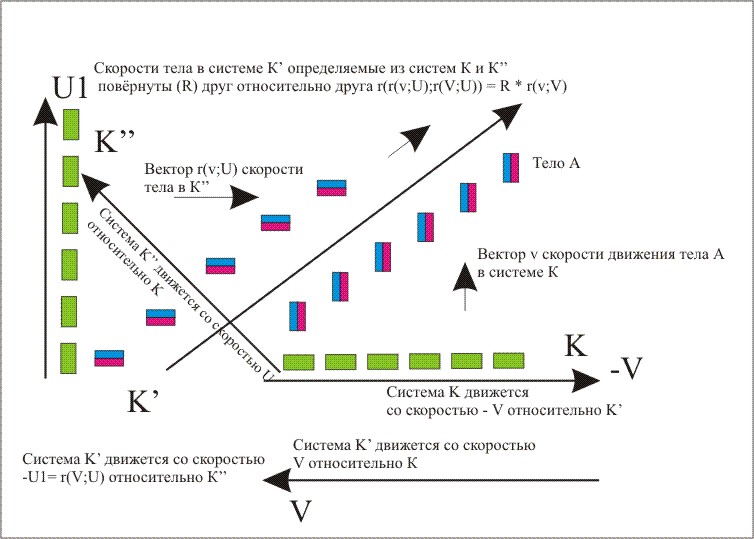
Рисунок воспроизводит поясняющий Рисунок из статьи:
NewScientist 29 October 2008 поместил статью
Mark Buchanon
Why Einstein was wrong about relativity (pp. 28-31)
где автор рассказывает об этом открытии.
http://www.newscientist.com/article/mg2 ... ivity.htmlПредложенный Фейгенбаумом подход активно обсуждается с 2005 года.
Требуется солидная математическая подготовка, чтобы понять, что же такое эти "вращения Вигнера". Рисунок выше, хотя иллюстрирует суть проблемы, но, на наш взгляд, всё-таки не даёт полной картины и служит лишь наглядной иллюстрацией возникновения "специфических вращений": тело-прямоугольник при этом поворачивается вдоль оси, перпендикулярной плоскости скоростей.
Ясно только, что
подход Фейгенбаума кардинально меняет всё наше понимание того, что такое релятивистские эффекты. Фундаментальная константа, стоящая в релятивистских формулах не обязательно равна скорости света. Только опыт может определить её значение. Если скорость света меньше этой константы, то фотоны должны иметь массу и, как любые массивные частицы, испытывать гравитационное притяжение, что, возможно, объясняет явление искривления лучей вблизи массивных тел.